луноход, транспортное устройство, управляемое автоматически или космонавтами, способное передвигаться по Луне, предназначенное для проведения исследования Луны. Перед советскими учеными и конструкторами при разработке и создании лунохода встала необходимость решения комплекса сложных проблем. Надо было создать совершенно новый тип машины, способной длительное время функционировать в необычных условиях открытого космоса на поверхности другого небесного тела. Основные задачи: создание оптимального движителя с высокой проходимостью при малых массе и энергопотреблении, обеспечивающего надёжную работу и безопасность движения; систем дистанционного управления движением лунохода; обеспечение необходимого теплового режима с помощью системы терморегулирования, поддерживающей температуру газа в приборных отсеках, элементов конструкции и оборудования, расположенных внутри герметичных отсеков и вне их (в открытом космосе в периоды лунных дней и ночей) в заданных пределах; выбор источников питания, материалов для элементов конструкции; разработка смазочных материалов и систем смазок для условий вакуума и другое.
Научная аппаратура Л. с. а. должна была обеспечить изучение топографических и селено-морфологических особенностей местности; определение химического состава и физико-механических свойств грунта; исследование радиационной обстановки на трассе перелёта к Луне, в окололунном пространстве и на поверхности Луны; рентгеновского космического излучения; эксперименты по лазерной локации Луны. Первый Л. с. а. - советский "Луноход-1" (
рис. 1), предназначенный для проведения большого комплекса научных исследований на поверхности Луны, был доставлен на Луну автоматической межпланетной станцией "Луна-17" (смотри "
Луна"), проработал на её поверхности с 17 ноября 1970 по 4 октября 1971 и прошёл 10540
м. "Луноход-1" состоит из 2 частей: приборного отсека и колёсного шасси. Масса "Лунохода-1" 756
кг. Герметичный приборный отсек имеет форму усечённого конуса. Корпус его изготовлен из магниевых сплавов, обеспечивающих достаточные прочность и лёгкость. Верхняя часть корпуса отсека используется как радиатор-охладитель в системе терморегулирования и закрывается крышкой. В период лунной ночи крышка закрывает радиатор и препятствует излучению тепла из отсека. В течение лунного дня крышка открыта, и элементы солнечной батареи, расположенные на её внутренней стороне, обеспечивают подзарядку аккумуляторов, питающих бортовую аппаратуру электроэнергией.
В приборном отсеке размещены системы терморегулирования, электропитания, приёмные и передающие устройства радиокомплекса, приборы системы дистанционного управления и электронно-преобразовательные устройства научной аппаратуры. В передней части расположены: иллюминаторы телевизионных камер, электрический привод подвижной остронаправленной антенны, служащей для передачи на Землю телевизионных изображений лунной поверхности; малонаправленная антенна, обеспечивающая приём радиокоманд и передачу телеметрической информации, научные приборы и оптический уголковый отражатель, изготовленный во Франции. По левому и правому бортам установлены: 2 панорамные телефотокамеры (причём в каждой паре одна из камер конструктивно объединена с определителем местной вертикали), 4 штыревые антенны для приёма радиокоманд с Земли в другом диапазоне частот. Для подогрева газа, циркулирующего внутри аппарата, служит изотопный источник тепловой энергии. Рядом с ним расположен прибор для определения физико-механических свойств лунного грунта.
Резкие температурные перепады при смене дня и ночи на поверхности Луны, а также большая разница температур между деталями аппарата, находящимися на Солнце и в тени, обусловили необходимость разработки специальной системы терморегулирования. При низких температурах в период лунной ночи для обогрева приборного отсека автоматически прекращается циркуляция газа-теплоносителя по контуру охлаждения и газ направляется в контур подогрева.
Система электропитания лунохода состоит из солнечной и химической буферных батарей, а также приборов автоматического управления. Управление приводом солнечной батареи осуществляется с Земли; при этом крышка может быть установлена на любой угол в пределах от нуля до 180°, необходимый для максимального использования солнечной энергии.
Бортовой радиокомплекс обеспечивает приём команд из Центра управления и передачу информации с борта аппарата на Землю. Ряд систем радиокомплекса используется не только при работе на поверхности Луны, но и на участке перелёта с Земли. Две телевизионные системы Л. с. а. служат для решения самостоятельных задач. Система малокадрового телевидения предназначена для передачи на Землю телевизионных изображений местности, необходимых экипажу, управляющему с Земли движением лунохода. Возможность и целесообразность применения такой системы, для которой характерна более низкая по сравнению с вещательным телевизионным стандартом скорость передачи изображения, была продиктована специфическими лунными условиями. Основное из них - медленное изменение ландшафта при движении лунохода. Вторая телевизионная система служит для получения панорамного изображения окружающей местности и съёмки участков звёздного неба, Солнца и Земли с целью астроориентации. Система состоит из 4 панорамных телефотокамер.
Самоходное шасси обеспечивает решение принципиально новой задачи космонавтики - передвижение автоматической лаборатории по поверхности Луны. Оно выполнено таким образом, чтобы луноход имел высокую проходимость и надёжно работал в течение длительного времени при минимальной собственной массе и потребляемой электроэнергии. Шасси обеспечивает передвижение лунохода вперёд (с 2 скоростями) и назад, повороты на месте и в движении. Оно состоит из ходовой части, блока автоматики, системы безопасности движения, прибора и комплекса датчиков для определения механических свойств грунта и оценки проходимости шасси. Поворот достигается за счёт различных скоростей вращения колёс правого и левого бортов и изменением направления их вращения. Торможение осуществляется переключением тяговых электродвигателей шасси в режим электродинамического торможения. Для удержания лунохода на уклонах и его полной остановки включаются дисковые тормоза с электромагнитным управлением. Блок автоматики управляет движением лунохода по радиокомандам с Земли, измеряет и контролирует основные параметры самоходного шасси и автоматическую работу приборов для исследования механических свойств лунного грунта. Система безопасности движения обеспечивает автоматическую остановку при предельных углах крена и дифферента и перегрузках электродвигателей колёс.
Прибор для определения механических свойств лунного грунта позволяет оперативно получать информацию о грунтовых условиях движения. Пройденный путь определяется по числу оборотов ведущих колёс. Для учёта их пробуксовки вносится поправка, определяемая с помощью свободно катящегося девятого колеса, которое специальным приводом опускается на грунт и поднимается в исходное положение. Управление аппаратом осуществляется из Центра дальней космической связи экипажем в составе командира, водителя, штурмана, оператора, бортинженера.
Режим движения выбирается в результате оценки телевизионной информации и оперативно поступающих телеметрических данных о величине крена, дифферента пройденного пути, состояния и режимах работы приводов колёс. В условиях космического вакуума, радиации, значительных перепадов температур и сложного рельефа местности по трассе движения все системы и научные приборы лунохода функционировали нормально, обеспечив выполнение как основной, так и дополнительной программ научных исследований Луны и космического пространства, а также инженерно-конструкторских испытаний.
"Луноход-1" детально обследовал лунную поверхность на площади 80 000 м2. Для этого с помощью телевизионных систем было получено более 200 панорам и свыше 20 000 снимков поверхности. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава. Прекращение активного функционирования "Лунохода-1" было вызвано выработкой ресурсов его изотопного источника тепла. В конце работы он поставлен на практически горизонтальной площадке в такое положение, при котором уголковый светоотражатель обеспечил многолетнее проведение лазерной локации его с Земли.
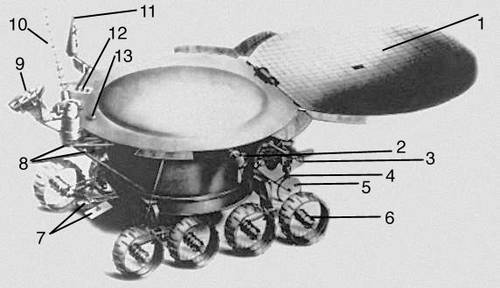
16 января 1973 с помощью автоматической станции "Луна-21" в район восточной окраины Моря Ясности (древний кратер Лемонье) был доставлен "Луноход-2" (рис. 2). Выбор указанного района посадки диктовался целесообразностью получения новых данных из сложной зоны сочленения моря и материка. Усовершенствование конструкции к бортовых систем, а также установка дополнительных приборов и расширение возможностей аппаратуры позволили значительно повысить манёвренность и выполнить большой объём научных исследований. За 5 лунных дней в условиях сложного рельефа "Луноход-2" прошёл расстояние 37 км.
При полётах космических кораблей "Аполлон-15", "Аполлон-16" и "Аполлон-17" американские космонавты использовали двухместные луноходы "Ровер" (смотри
Космонавтика). Луноход четырехколёсный, каждое колесо имеет диаметр 81
см и ширину 23
см. Подвеска колёс торсионная. Каждое колесо ведущее и имеет индивидуальный двигатель. В кабине лунохода смонтирована штурвальная колонка самолётного типа, позволяющая космонавтам регулировать скорость, тормозить, делать повороты. Система управления лунохода, включающая малогабаритное выключательное устройство, позволяет определять направление движения, общее пройденное расстояние, расстояние от лунной кабины по прямой и направление на лунную кабину. Комплект специального радиотехнического оборудования (
лунный ретрансляционный блок) обеспечивает непосредственную связь космонавтов с Землёй. Луноход размещается в сложенном состоянии в посадочной ступени лунной кабины. Извлечение лунохода, установка его на грунт и приведение в рабочее положение обеспечивается одним космонавтом.
Масса лунохода - 725 кг (собственно луноход - 211, космонавты с ранцевыми системами жизнеобеспечения - 364, научные приборы - 54, съёмочное и связное оборудование - 69, образцы лунных пород и пр. - остальное). Длина лунохода 3,1 м, ширина 2,1 м, высота 1,1 м, ширина колеи 1,83 м, ресурс хода 65 км, максимальная скорость 13 км/ч.
Луноход рассчитан на преодоление склонов крутизной до 20°, препятствий высотой до 30 см, трещин шириной до 70 см. Максимальный допустимый крен и дифферент 45°. Расстояние, пройденное луноходами, составило (км) при полёте: "Аполлона-15" - 27,2, "Аполлона-16" - 27,1, "Аполлона-17" - 35,7. "Ровер" намного облегчил работу космонавтов на Луне.
Лит.: Передвижная лаборатория на Луне "Луноход-1", М., 1971; Освоение космического пространства в СССР, М., 1973.
А. А. Еременко.
Рис. 2. "Луноход-2": 1 - телекамера; 2 - астрофотометр; 3 - уголковый отражатель; 4 - магнитометр; 5 - выносная телекамера; 6 - остронаправленная антенна; 7 - фотоприёмник; 8 - солнечная батарея; 9 - телефотометры; 10 - прибор оценки проходимости; 11 - выносной блок аппаратуры для химического анализа грунта (РИФМА).
Рис. 1. "Луноход-1": 1 - солнечная батарея; 2 - телефотометр; 3 - штыревая антенна; 4 - прибор оценки проходимости; 5 - прибор счисления пути; 6 - мотор-колесо; 7 - выносной блок аппаратуры РИФМА; 8 - телекамеры; 9 - уголковый отражатель; 10 - остронаправленная антенна; 11 - малонаправленная антенна; 12 - блок рентгеновского телескопа; 13 - дозиметр.


.JPG?width=200)
![752-го гв. мсп]]''.](https://commons.wikimedia.org/wiki/Special:FilePath/2S23 self-propelled mortar-howitzer 02.jpg?width=200 "752-го гв. мсп]]''.")
.jpg?width=200 "3 inch Mortar Carrier на базе австралийского варианта транспортёра")


![M106]]](https://commons.wikimedia.org/wiki/Special:FilePath/M106 mortar carrier outline.jpg?width=200 "M106]]")




![Soltam K6]],}} установленный на шасси [[M113]]).](https://commons.wikimedia.org/wiki/Special:FilePath/Keshet-120-mortar001.jpg?width=200 "Soltam K6]],}} установленный на шасси [[M113]]).")
![120-мм СМ [[M1064]].](https://commons.wikimedia.org/wiki/Special:FilePath/5-7 CAV shoots mortars in prep for Anakonda 16 160420-A-CY863-006.jpg?width=200 "120-мм СМ [[M1064]].")

![Испанский 81-мм Cardom на шасси [[VAMTAC]].](https://commons.wikimedia.org/wiki/Special:FilePath/VAMTAC Cardom.jpg?width=200 "Испанский 81-мм Cardom на шасси [[VAMTAC]].")
![2С40 «Флокс»]] на шасси [[Урал-63704-0010]].](https://commons.wikimedia.org/wiki/Special:FilePath/Army2016-521.jpg?width=200 "2С40 «Флокс»]] на шасси [[Урал-63704-0010]].")
![Дубнице-над-Вагом]].](https://commons.wikimedia.org/wiki/Special:FilePath/BAHNA 2018 - 321.jpg?width=200 "Дубнице-над-Вагом]].")
![Type 96]]](https://commons.wikimedia.org/wiki/Special:FilePath/96式自走120mm迫撃砲 (1).jpg?width=200 "Type 96]]")



![крыло]] лунного автомобиля (Аполлон-17)](https://commons.wikimedia.org/wiki/Special:FilePath/AS17-137-20979.jpg?width=200 "крыло]] лунного автомобиля (Аполлон-17)")


![Космическом центре имени Кеннеди]]](https://commons.wikimedia.org/wiki/Special:FilePath/Apollo 15 LM & LRV in KSC.jpg?width=200 "Космическом центре имени Кеннеди]]")
![«Луномобиль» № 1 на заводе корпорации [[Boeing]] в Кенте, [[штат Вашингтон]], перед самой отправкой в [[Космический центр имени Кеннеди]]](https://commons.wikimedia.org/wiki/Special:FilePath/Apollo 15 LRV at Boeing plant.jpg?width=200 "«Луномобиль» № 1 на заводе корпорации [[Boeing]] в Кенте, [[штат Вашингтон]], перед самой отправкой в [[Космический центр имени Кеннеди]]")
![Джон Янг]] работает у лунного автомобиля рядом с лунным модулем «Орион». Апрель 1972 года](https://commons.wikimedia.org/wiki/Special:FilePath/Apollo 16 LM Orion.jpg?width=200 "Джон Янг]] работает у лунного автомобиля рядом с лунным модулем «Орион». Апрель 1972 года")
![Джеймс Ирвин]] у «луномобиля»](https://commons.wikimedia.org/wiki/Special:FilePath/Apollo 15 Irwin LRV EVA-1.jpg?width=200 "Джеймс Ирвин]] у «луномобиля»")
![Дэвид Скотт]] и «луномобиль» у каньона Хэдли Рилл](https://commons.wikimedia.org/wiki/Special:FilePath/Apollo 15 Station 2 Rille, Lunar Rover, Scott.jpg?width=200 "Дэвид Скотт]] и «луномобиль» у каньона Хэдли Рилл")



![Юджин Сернан]] совершает пробный заезд на лунном автомобиле](https://commons.wikimedia.org/wiki/Special:FilePath/NASA Apollo 17 Lunar Roving Vehicle.jpg?width=200 "Юджин Сернан]] совершает пробный заезд на лунном автомобиле")


.jpg?width=200 "СВИКС-001")

![Телеуправляемый подводный робототехнический комплекс «Шельф» на выставке «[[Армия-2021]]».](https://commons.wikimedia.org/wiki/Special:FilePath/Remote-controlled underwater robotic complex "Shelf" during the "Armiya 2021" exhibition.jpg?width=200 "Телеуправляемый подводный робототехнический комплекс «Шельф» на выставке «[[Армия-2021]]».")